Finger Design
A key part of this project is designing an ergonomic, human-like hand with fingers that translate operator movements in a convenient way.
And so, the finger design is vital, as well as the sensing and movement.
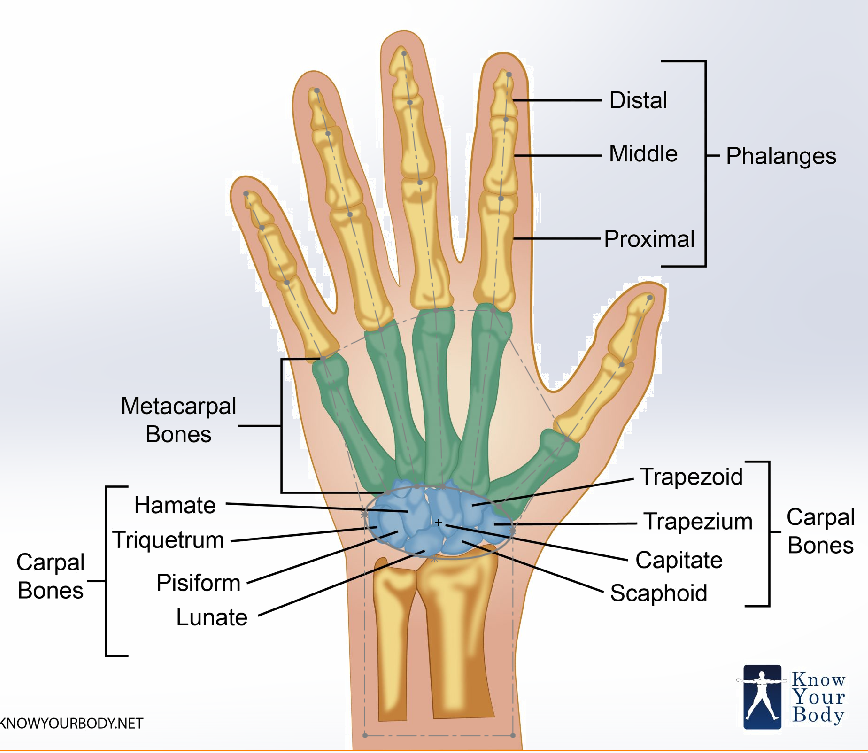
The very first thing I did was look at how the human hand moves, and how it’s built up.
Each finger has one tendon controlling the retraction of the finger, and another rotating the finger around the hand. And so, this is how I intend to control the fingers. This should help offer a natural movement in the robotic hand.
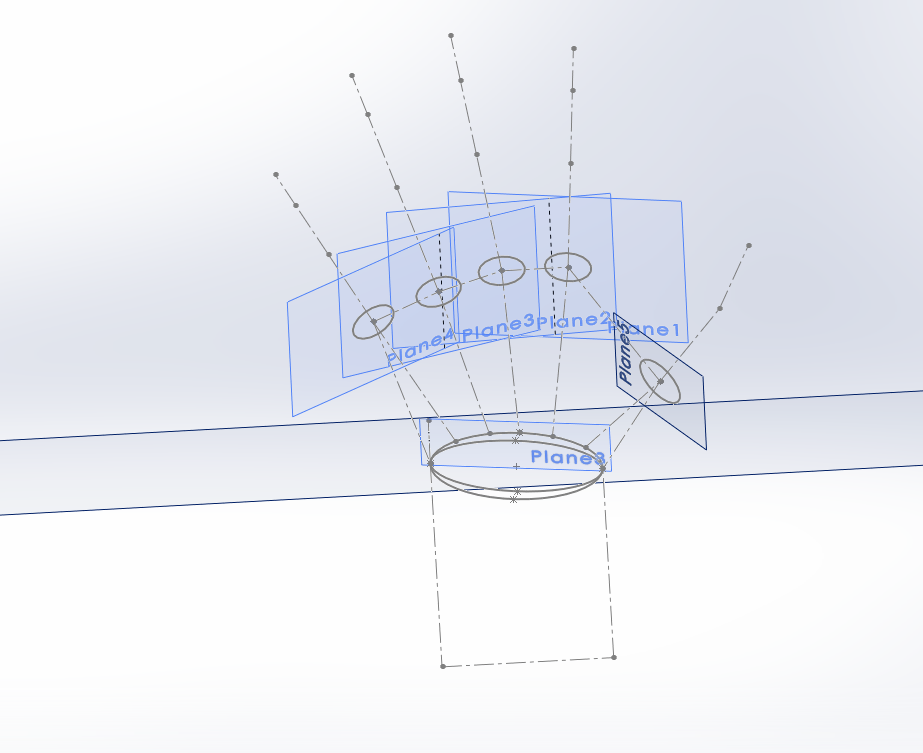
To experiment with robotic finger design I 3D modelled the bones of a hand, so I could 3D print some finger designs.
One designed uses a Live hinge and one uses a conventional hinge.