Video Demonstration
As part of the submission, a video demonstration of the had has been made.
First Grasping Action
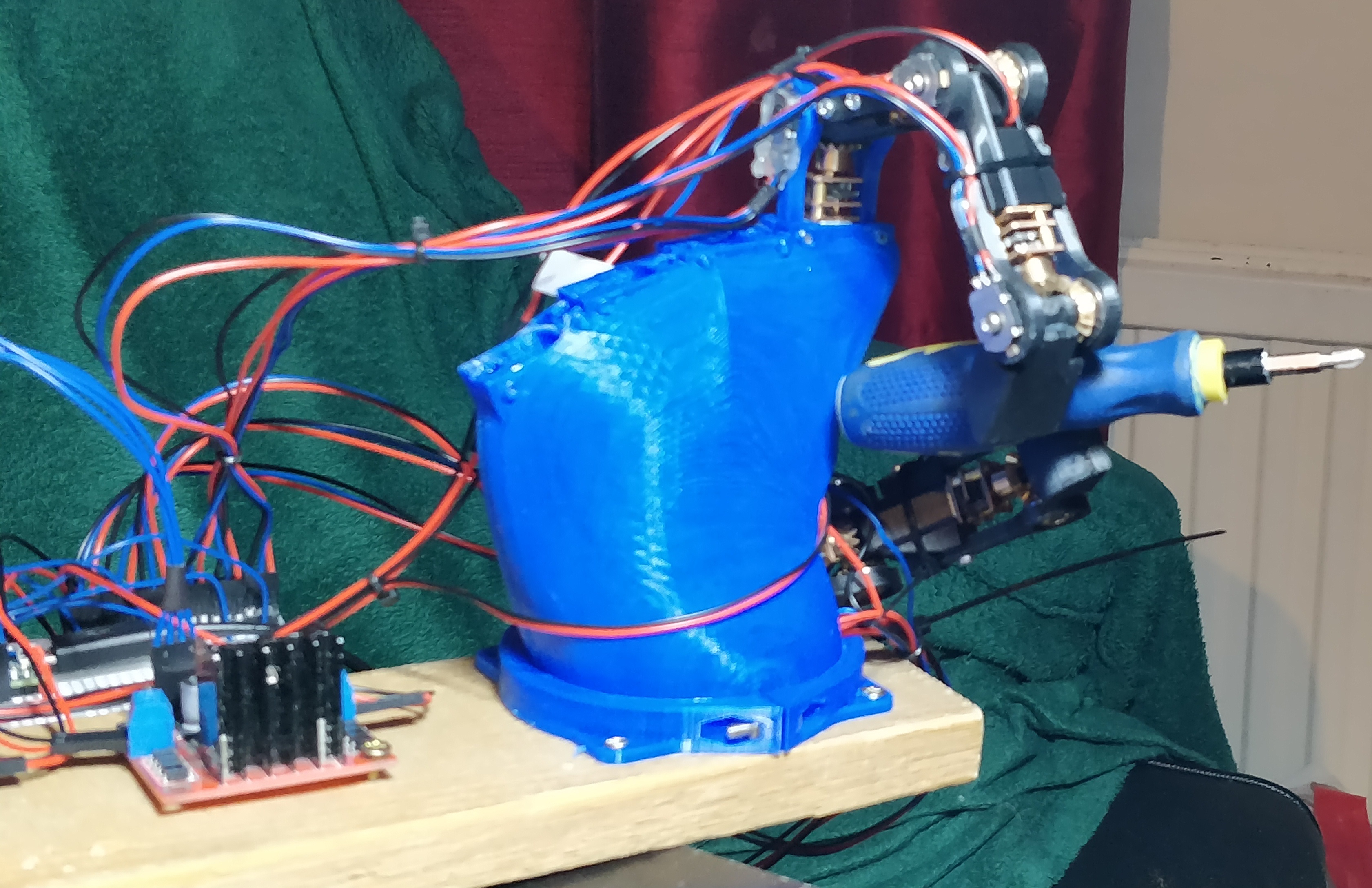
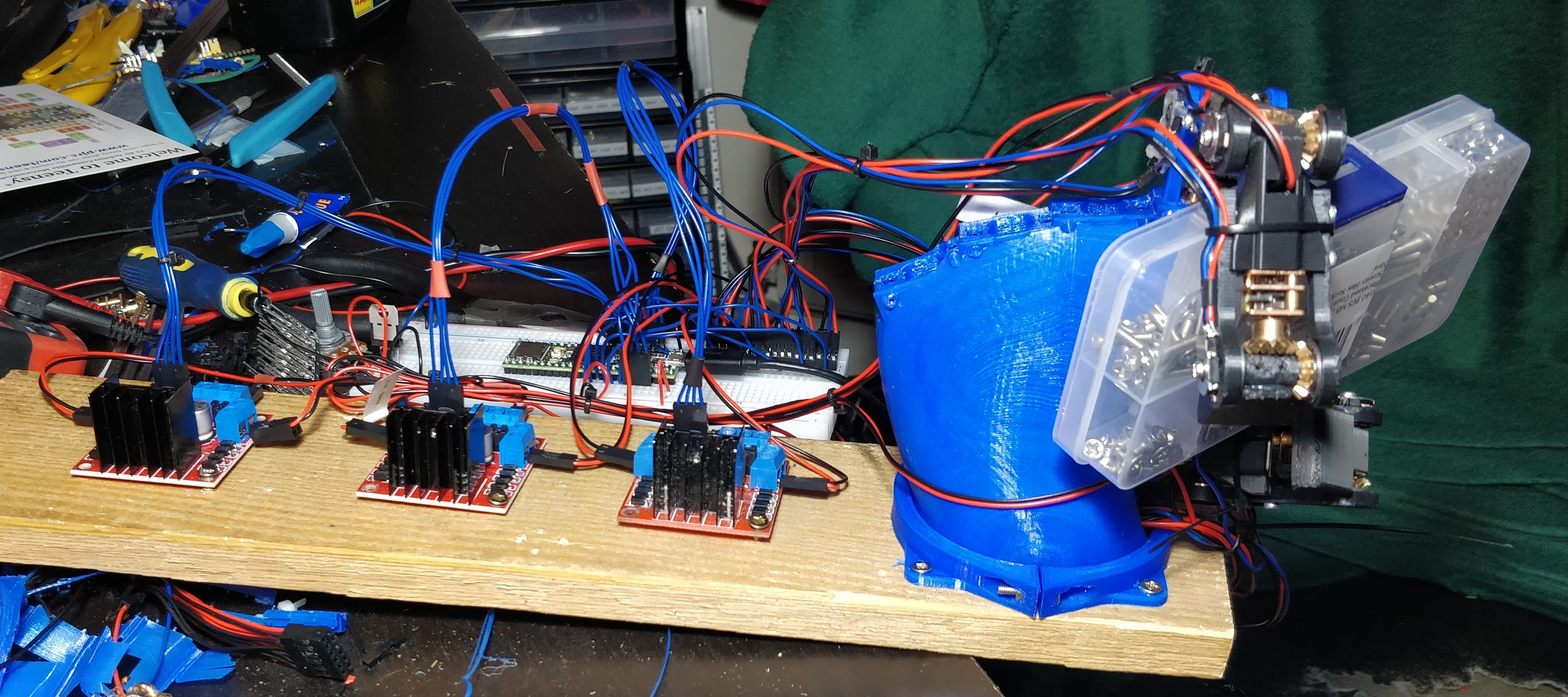
After wiring up and testing the hardware, simple grasping was attempted.
Here you can see the result. The hand successfully held both a large, heavy box filled with M3 nuts and bolts wrapping around it with the joints. As well as pinching a small light screwdriver in the finger tips.
Modular Arduino Code
As the control of the hand is based around many, repeating PID loops, the Arduino control code is designed to be modular, easily expandable and repeatable.
Each joint is based around a simple array which contains all the important data. The source code is available on the GitHub page.
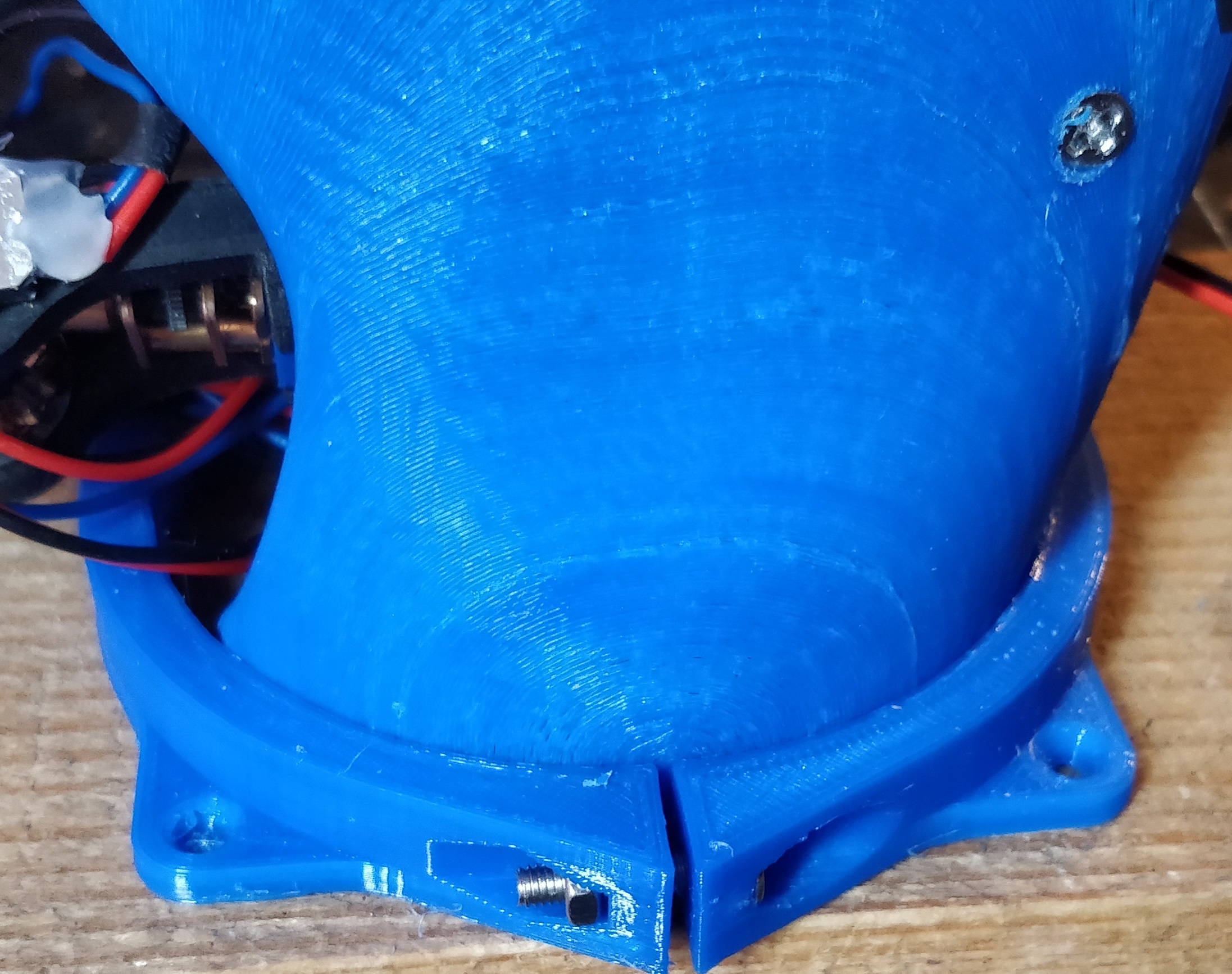
Mounting the hand
To menonstrate the abilities of the robotic hand, the device must be mounted. Bellow is a simple 3D printed clamp design, which allows theahdntobe mounted on a surface using either M3 bolts or simple screws.