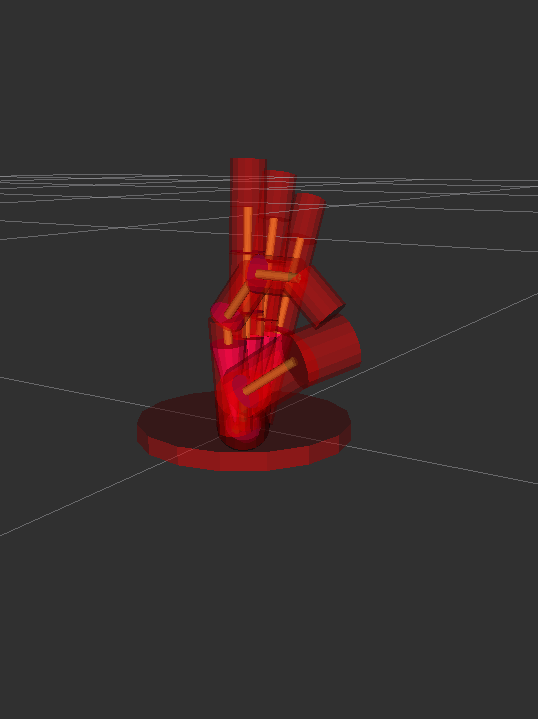
Modeling the hand within ROS
The Robot operating System is to be used to control and simulate the hand.
Replacing the Condyloid Joint Part 3
The previously talked about universal joint prototype failed. The connecting parts were too thing annd broke during assembly, and so a different design is required.
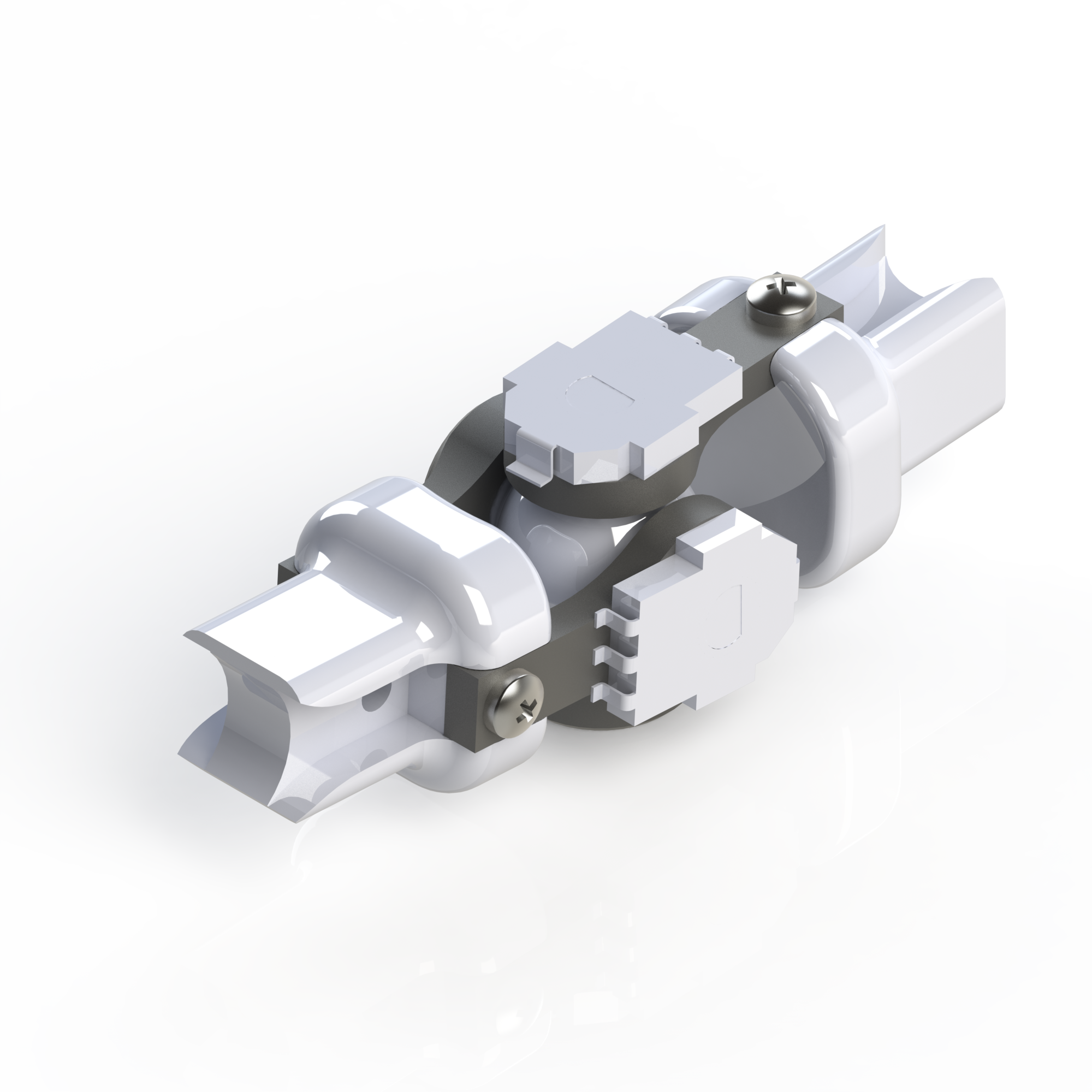
Replacing the Condyloid Joint Part 2
Sadly, the prototype universal joint shown previously came off the printer very fragile and was not suitable for this device.
Another, thicker joint was designed and printed, however, due to the size restraint and requirement for two degrees of freedom the part just wasn’t strong enough to take a load and broke quite quickly.

Replacing the Condyloid Joint
The condyloid joint is nature’s answer to the problem of two degrees of freedom within the knuckle of the finger. However, as mentioned previously, nature does not always transfer well into mechanics. This is true of the condyloid joint in the knuckle.
To create a practical condyloid joint within this model, the joint must be small while not restricting the range of movement. However, to keep these features while also being small would require an external part latching the two joint parts together.