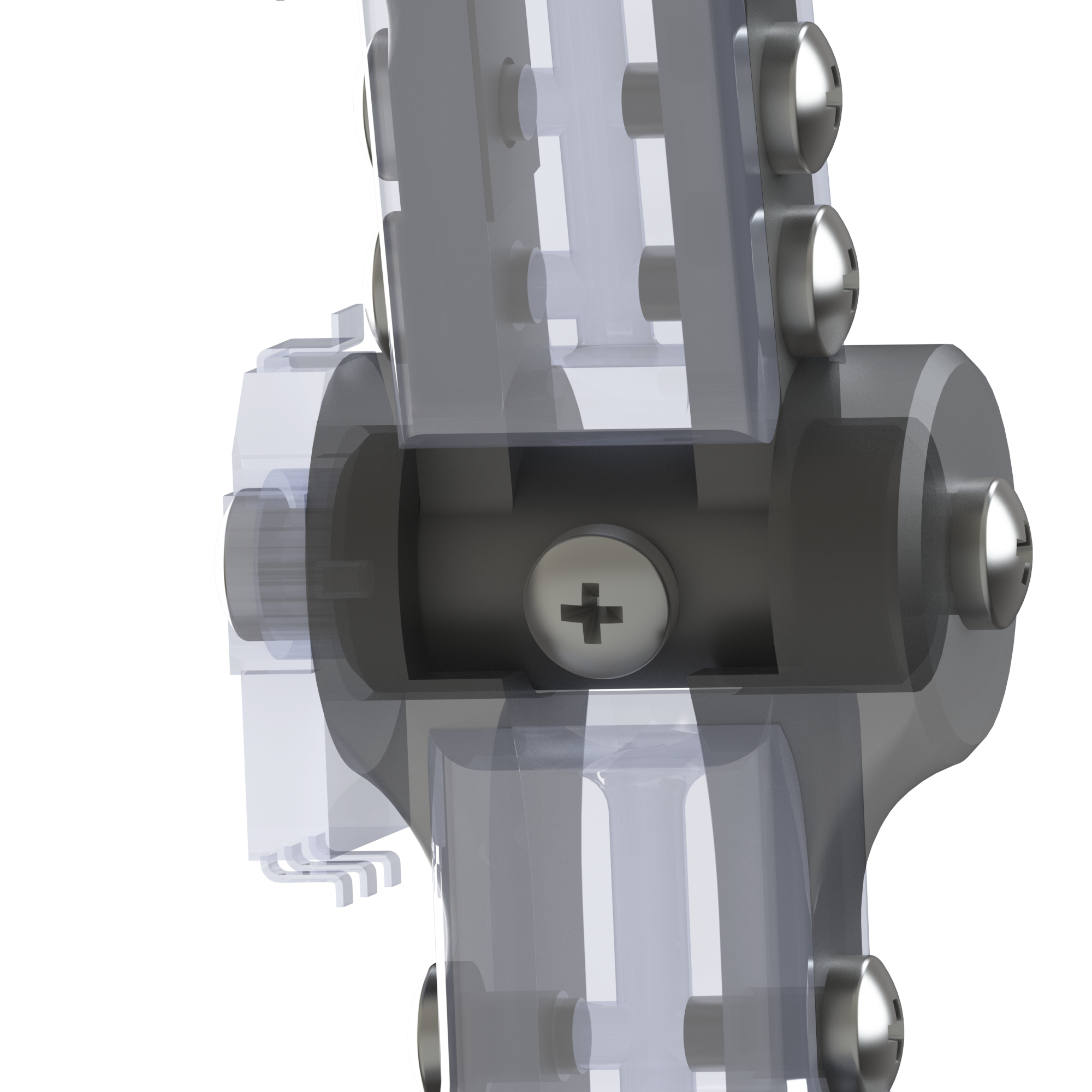
Universal Joint Redesign
While the principles and basic design of the current universal joint is good, the current implementation suffers from excessive friction and difficulty in controlling the curl axis.
To solve this the joint has been redesigned, based around the same principle but refined.
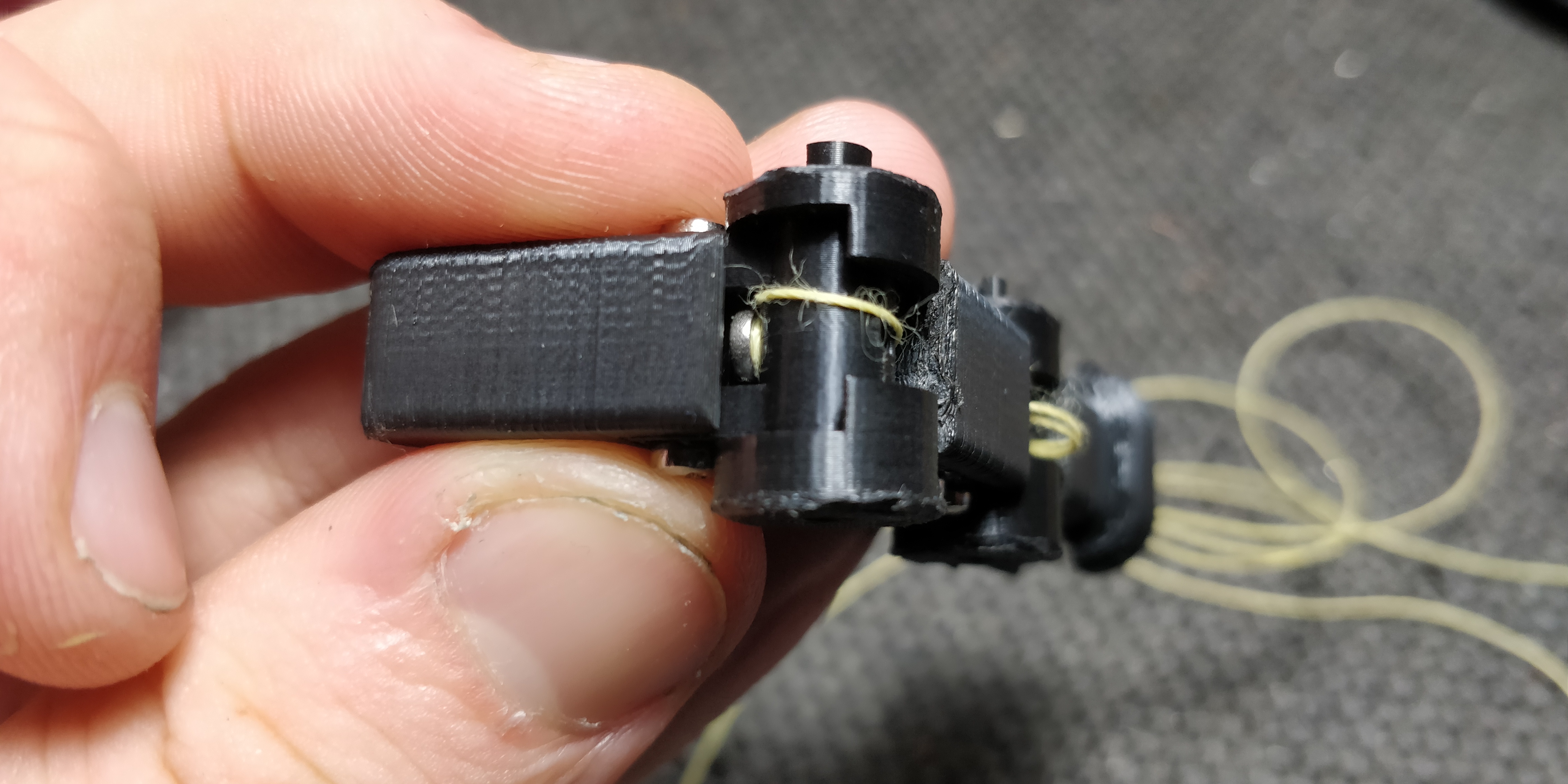
Assembly of the finger
Now the current design is reaching completion, the full assembly of the finger is underway. The control wires run down the centre of the finger to keep them tidy, free from external obstructions and to keep the actuation along the axis of the finger.

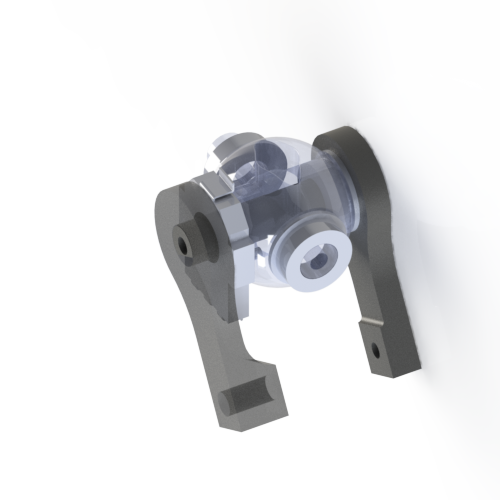
Hinge Redesign Part 2
While the hinge redesign did improve the control potential for the finger, during testing it was found that the finger actuation distance was not sufficient with the connecting cables horizontal to the axis, and so, instead the wires have been mounted to the top of each joint, allowing for a greater actuation distance.
Hinge Redesign
The hinge as used for several prototype iterations has performed very well, with a tight fit without excess friction. However, as motor actuation gets closer, its clear that this hinge is not ideal.
The previous acutation method involved attaching wires to the body of the finger sections. However, as this is offset from the axis of movement the lengs of eahcocntrol string will inevitably not be constant while moving. To solve this issue there are two possibilties.
- Add springs to the actuators. By using springs on the actuating arms, this slight change in length can be absorbed. As well as adding a conformal element to each joint mechanically. THe problem in this is the potential lack of acuracy thanks to the conformal nature of the springs, and the control difficulties these add.
- Moving the control to be in line with the axis. By moving the point where the actuator wires connect to be inline with the axis of movement, this offset is removed and the control is simplified. The problem with this is the added complexity to the design, and the potential redesign of hinge and finger elements
It has been decided, after experimentation and design attempts, to move the axis inline. It is thought to be the easiest and most reliable of overcoming this issue.