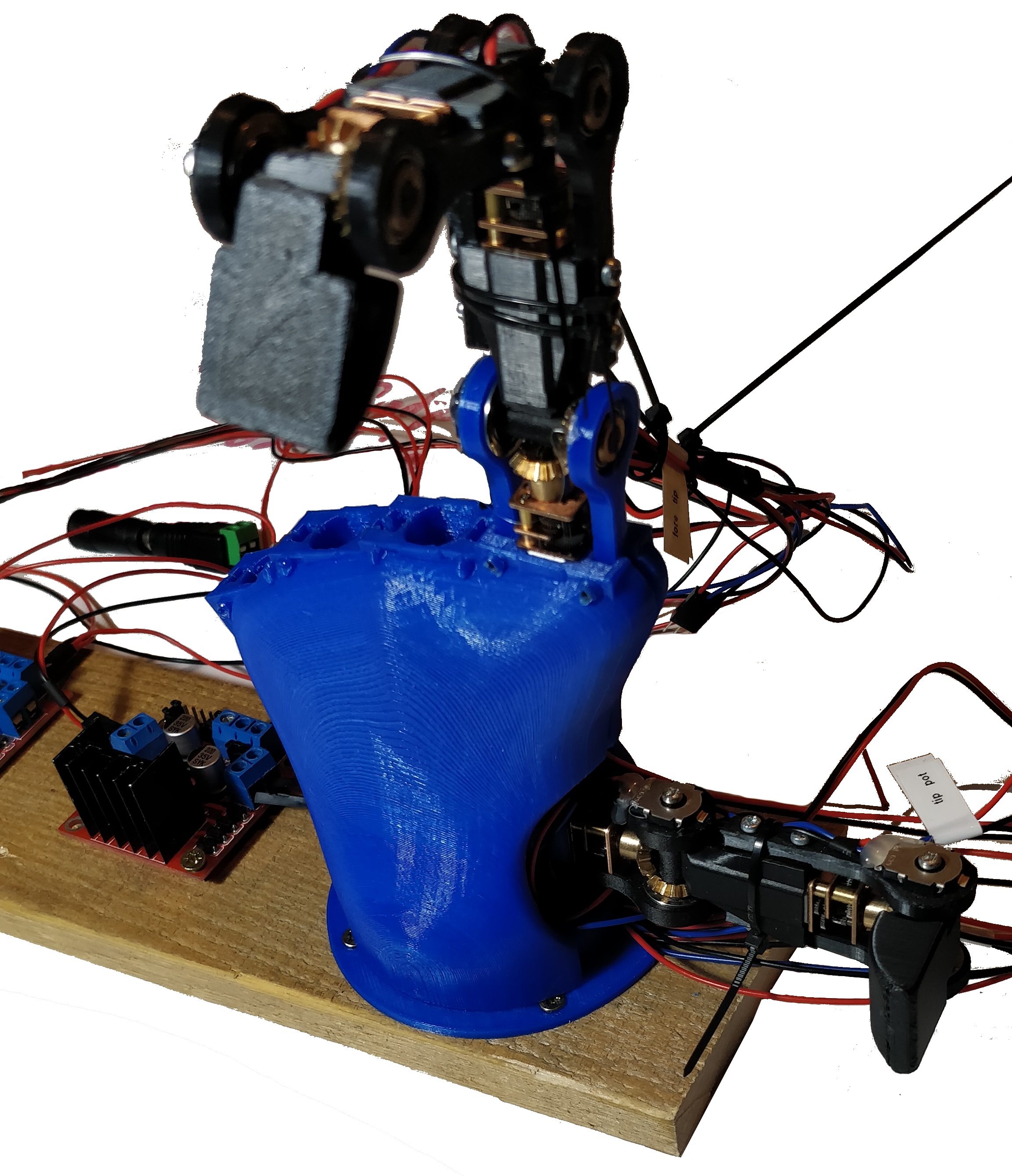
Wiring up the hand
As part of finishing off the hardware for this project, the hand has been wired up, placed on a temporary mount and had the H-bridges connected to the motors.
Advanced URDF file (computer modelling of the robotic hand)
As a continuation of the ROS integration, the placeholder URDF file has been replaced with an accurate and detailed model exported from SOLIDWORKS using the SOLIDOWKRS URDF exporter tool.
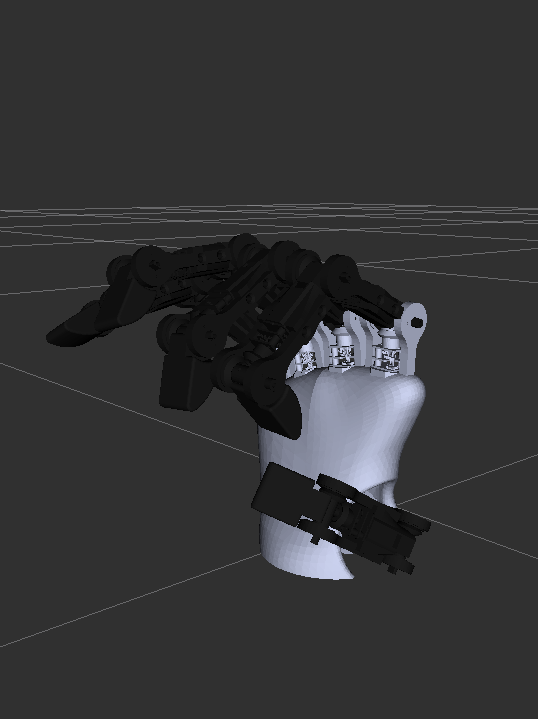
Read more: Advanced URDF file (computer modelling of the robotic hand)
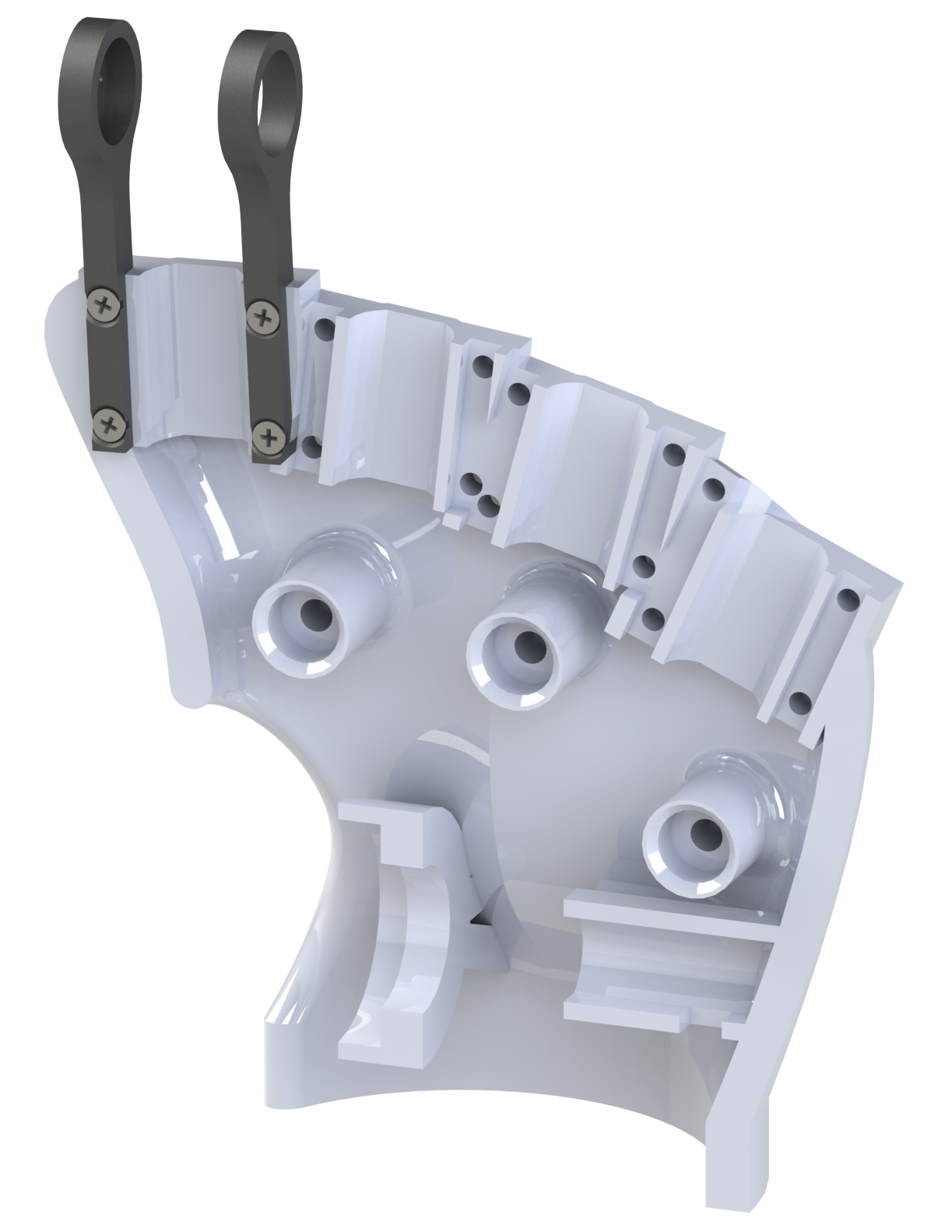
Palm Redesign
While working with the original palm design, a problem became apparent. Both the motors and the axil holders move within their fixings, meaning the finger could skip and wobble ruining the tolerance of the joint movement.
Neoprene Finger tip
As a part of the touch sensing, a compressable, and grippy neoprene finger tip is designed to fit over the tip of each finger. This both protects the touch sensative Velostat and offers a grippy surface to help the hand hold objects.
