Advanced URDF file (computer modelling of the robotic hand)
As a continuation of the ROS integration, the placeholder URDF file has been replaced with an accurate and detailed model exported from SOLIDWORKS using the SOLIDOWKRS URDF exporter tool.
This tool allows a solidworks part or assembly to be exported to a format ROS can interpret. This includes the STL mech files, textures and the URDF file. All the exporter needs are the links and joints defined.
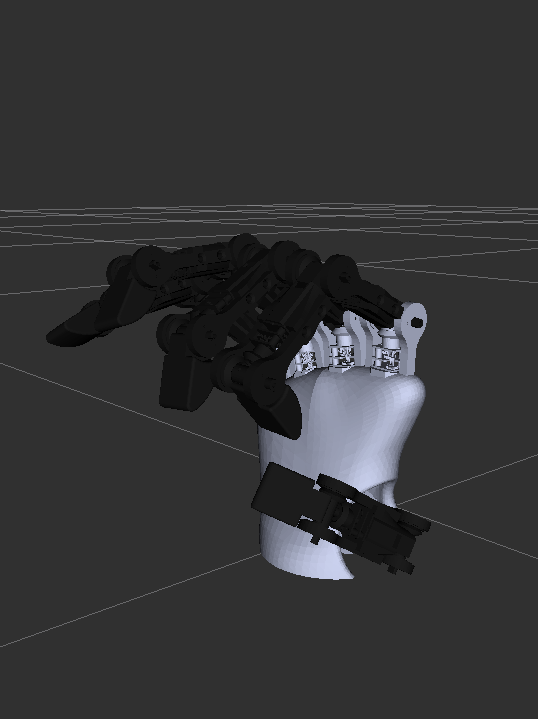
The above image shows the hand being visualised within RVIZ. The angle of each joint is set using the joint_state_publisher package.