Modeling the hand within ROS
The Robot operating System is to be used to control and simulate the hand.
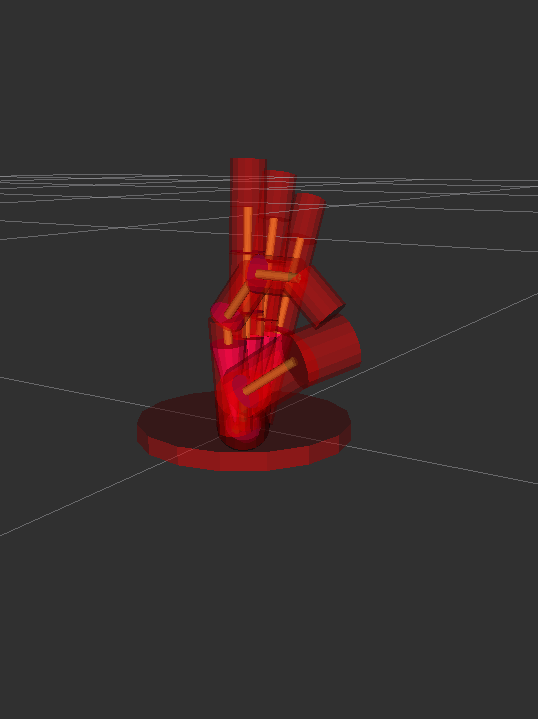
The hand has been modeled within a ROS package for this project. This model is defined within a URDF file. This is then displayed with RVIZ for debugging.
Each link can be manipulated through ROS, with the eventual intention for this to mirror the angles measured by the potentiometers on the physical fingers.