First Grasping Action
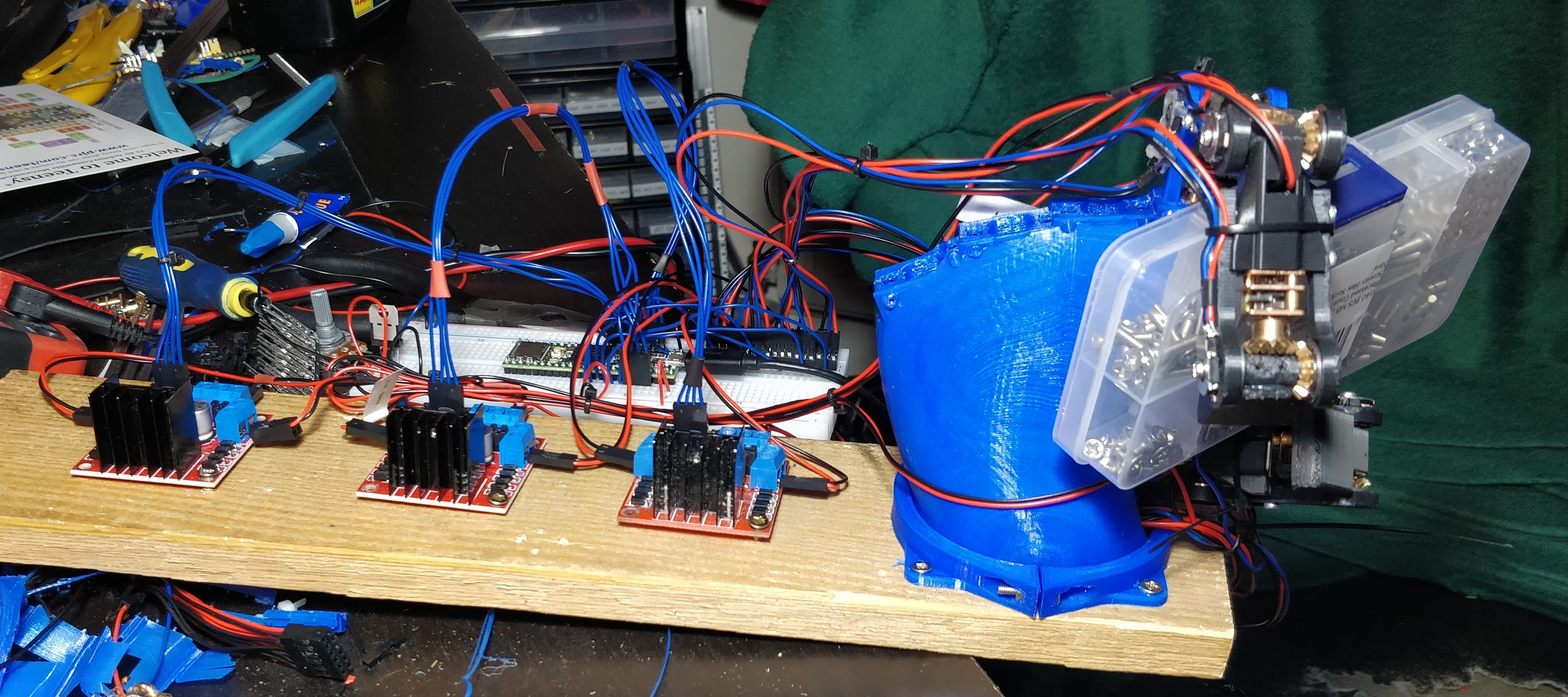
After wiring up and testing the hardware, simple grasping was attempted.
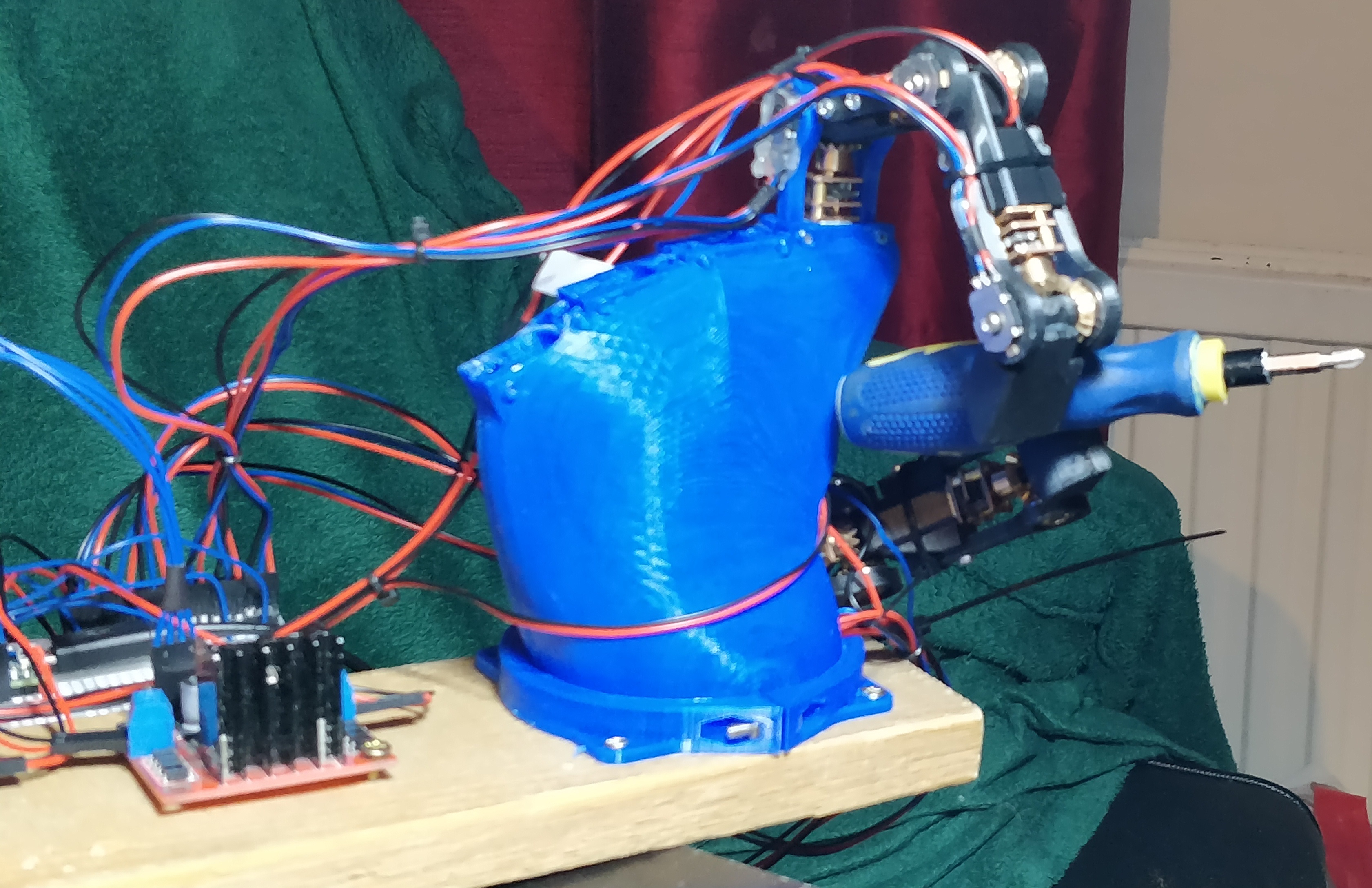
Here you can see the result. The hand successfully held both a large, heavy box filled with M3 nuts and bolts wrapping around it with the joints. As well as pinching a small light screwdriver in the finger tips.
The joints in the above demos are not yet properly calibrated yet. The controllers are just simple proportional controllers with a small integral element to help reduce the stead-state error. However, the system response is far from perfect.
The key problem so far, outside of tuning is the shape of the finger tips. The tips are quite square, and because how the thumb rotates, a pinching motion pinches the thumbs on small corners, minimising the surface area in contact. To improve upon this, the tips can be replaced by models that round over the sides more.