Examining the Human Hand
As this robotic end effector is intended to replicate the human hand, why not take lessons from nature?
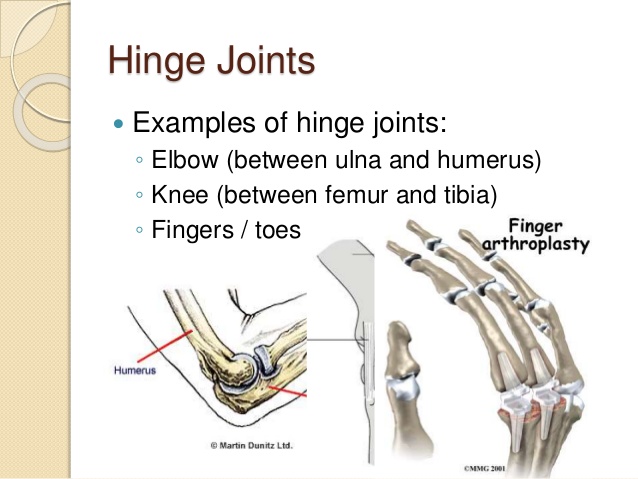
Here, the features of the human hand will be discussed, and the joint types explained, as well as possible translations into a mechanical system.
The main joint to be used within the robotic hand, is the hinge joint. This simple, single degree of freedom joint is created in nature by two curved bones connected with tendon.
Source:
Yue Wee via Slide Share
This is the simplest joint to replicate mechanically. Hinge joints make up most of the joints in the finger and so will be simple to implement. The hardest part will be adding a spring return mechanism and controlling the angle.
The second hinge within the human finger will be considerably more complex to implement and control.
Condyloid Joint
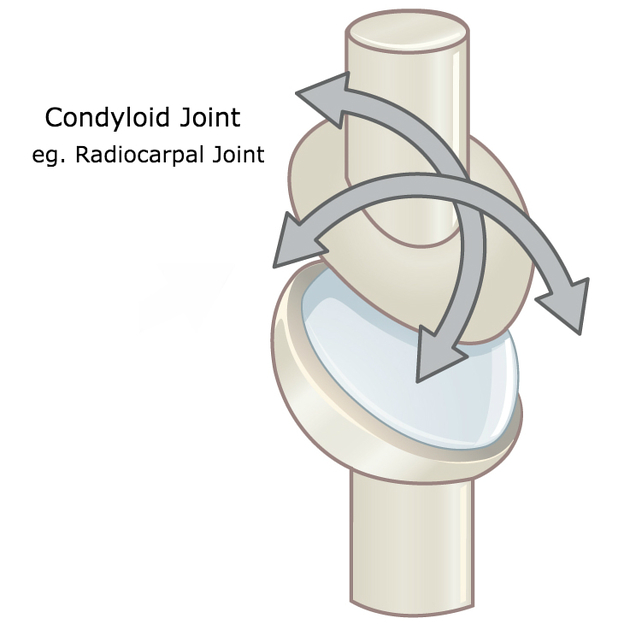
Condyloid joints allow movement with two degrees of freedom much like saddle joints. They allow flexion/extension, abduction/adduction and therefore also allow circumduction. Unlike ball and socket joints, condyloid joints do not allow axial rotation. Source
Replicating this joint mechanically, could pose an issue. While 3D printing this geometry would be difficult, due to the tight tolerances needed and the clean-up of the print. It would be possible. However, the hardest part will likely be controlling the movement of this joint.
This joint may be replaced with a much simpler ball and socket joint as these can be easily purchased and will likely perform better than something produced for this use.
Any joint with two degrees of freedom like this will require multiple actuators to control it, increasing the complexity of that joint, and requiring more sensors to detect the position.
Saddle Joint
The Saddle Joint is similar to the Condyloid joint, as it offers two degrees of freedom without axial rotation. However the sape is quire different.

Used in the thumb, this joint offers a very wide range of movement. Replicating this movement mechanically offers several difficulties. In biology tendon is used to keep the joints together, when mechanically this may nto be a practical method to replicate. Instead the joint may need to be designed to hold itself together.
The saddle joint is not dissimilar to the universal joint, and a joint like that will likely be used in the design.