All Four Fingers
As a part of the optimisation work done within Prototype 5, the structural sections of the fingers were simplified. This allowed the parts to be easily and quickly changed to suit the dimentions needed for the different fingers. This made increasing the mdoel to four fingers very simple.
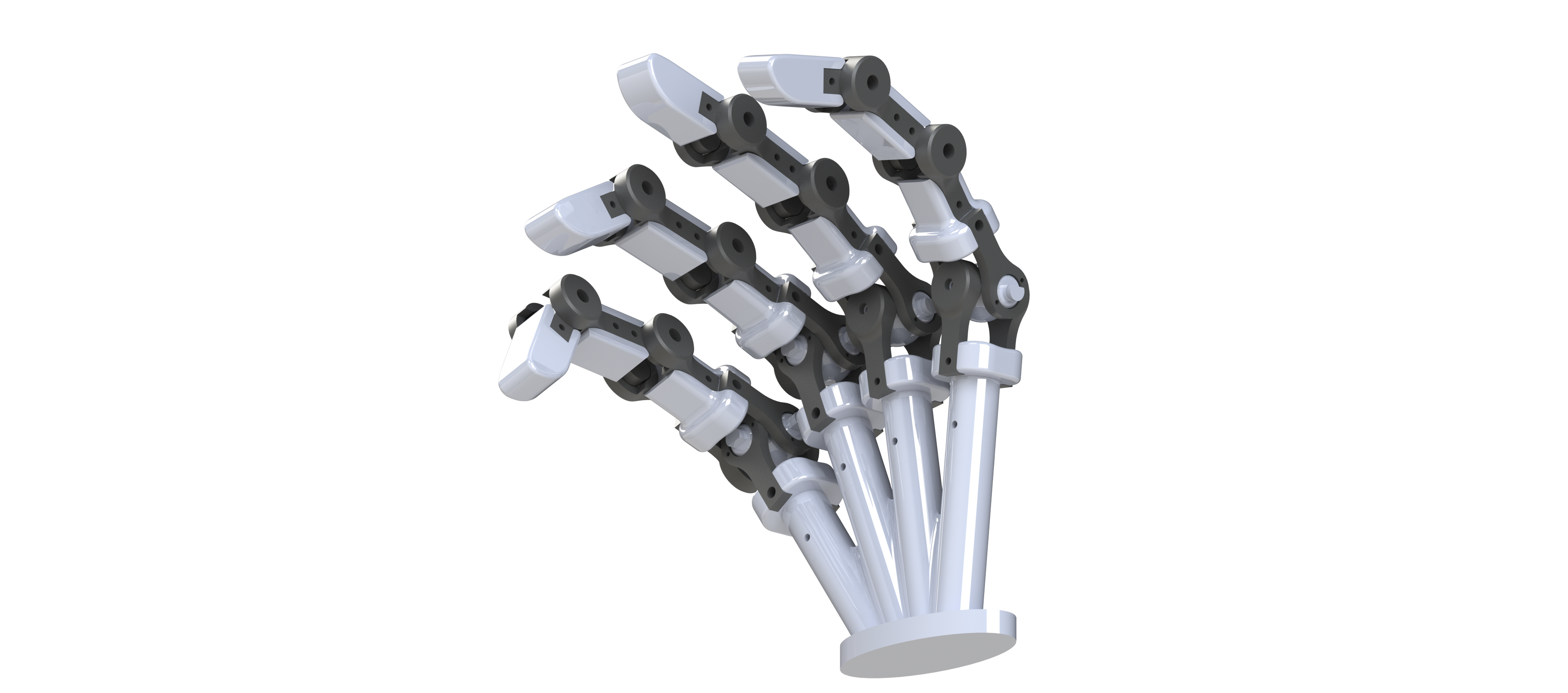
The palm section of this model is a simple placeholder, with the working dimentions for mounting each joint. This shows quite well where each finger will be and how it will meet up and interact with each other finger.
There is some concern over how close the universal joints are to one another, and so the plam may need to be altered slightly to allow these more clearance. This does race a concern of remaining accurate to the dimentions of a hand however.
Still to do:
There is yet anyway to actuate these joints, as the motors to test are yet to arrive, designing the mounts for the motors, or actuator methods have been left. This however, is most likely the next big step.