Adding the Thumb
Now there is a placeholder palm, the thumb can be added, and the angles adjusted as well as the degrees of freedom defined.
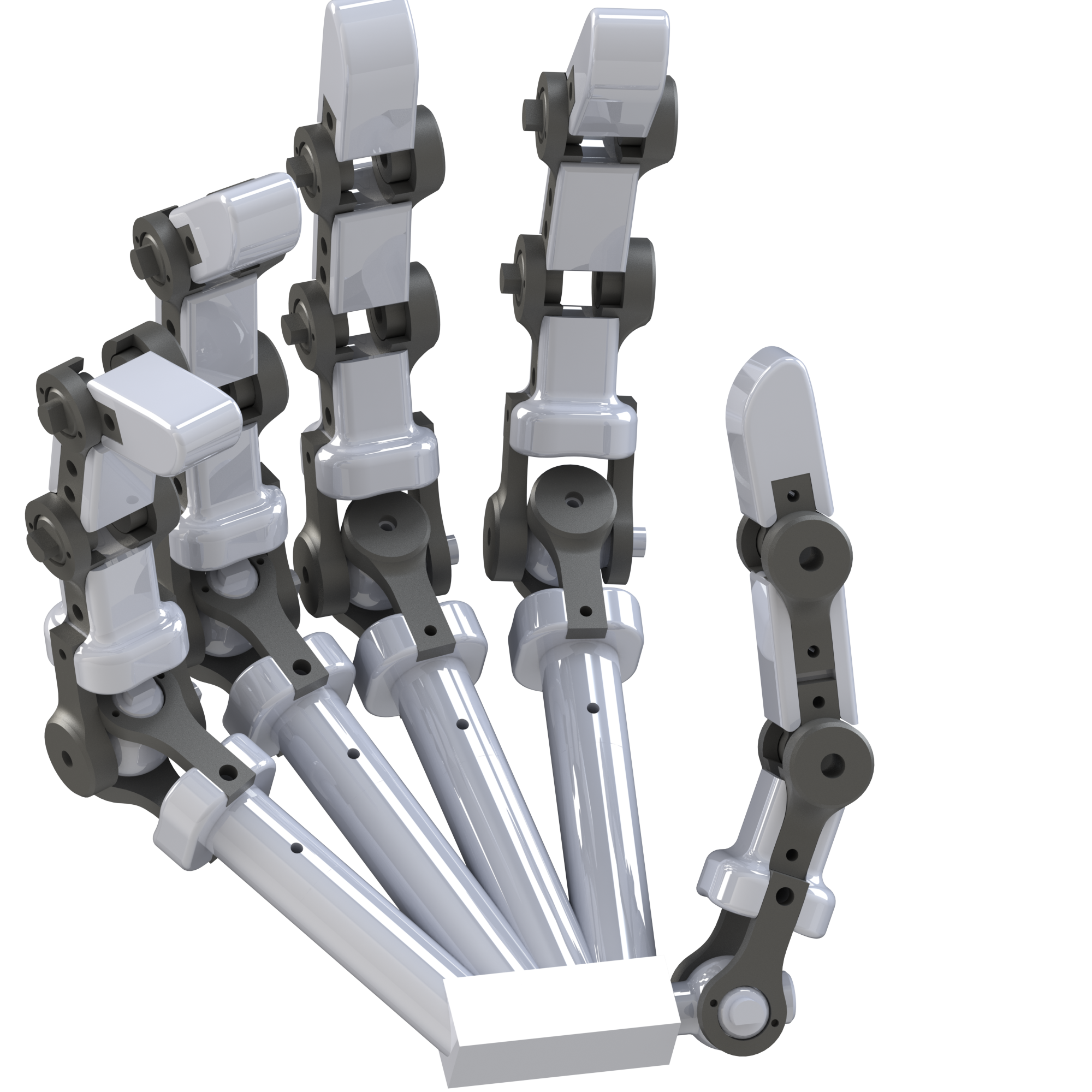
The thumb is very different from the fingers. As the thumb has one less bone and pivots from close to the wrist, the base of the thumb uses an adapted version of the universal joint used in the other fingers, attached directly onto the base. This is a rotational joint, with another rotation mounted on the ball, from this point it is very similar to the other fingers at this point.
The movements of the thumb are very complex, and this may not fully recreate all the positions and angles the thumb can achieve. However, this is a good starting point and allows for further development.
The palm used here is just a placeholder to allow the fingers to be mounted at the angles and lengths desired. As can be seen, the hand is starting to look quite human-like.